Understanding and Manipulating Cogging Torque in Permanent Magnet Brushless DC Motors with Isotropic Bonded Magnets
Understanding and Manipulating Cogging Torque in Permanent Magnet Brushless DC (BLDC) Motors with Isotropic Bonded Magnets
Modern automotive and home appliances seek motors offering higher power density and high efficiency. Permanent magnet brushless DC (PMBLDC) motors offer these and become an obvious choice. In a PMBLDC motor, one of the parameters that significantly influences its performance is cogging torque. This article explores the concept of cogging torque in the context of PMBLDC motors equipped with isotropic bonded magnets and provides an understanding of how this parameter can be adjusted and utilized to enhance motor performance.
Cogging torque is an intrinsic property of a permanent magnet motor and results from the interaction between a permanat magnet and the slots in the stator core. Essentially, it is the torque generated when the permanent magnets in the rotor attempting to line up with the slots, or teeth, of the stator or the cogging torque is produced due to the modulation of the airgap flux density and stator slots.
Cogging torque can result in higher noise, vibration, and position error measurement. In applications requiring less noise and vibration, the cogging torque becomes unwanted and needs to be minimized. It can be reduced by either reducing the rate of change of reluctance seen by the airgap flux or the rate of change of magnet flux with rotor position. Motor designers can mitigate cogging torque by careful selection of the motor’s physical structure, magnet and magnetization profile.
Physical Structure
The physical structure of the motor significantly reduces cogging torque. Some of the key design variables affecting the cogging torque are:
- Selection of number of stator slots and rotor poles
- Slot opening; and
- Presence of dummy slots.
i. Selection of the number of stator slots and rotor poles
The selection of slot and pole combinations will lead to different cogging frequencies. The higher the cogging torque frequency, the lower the magnitude of cogging torque. The slot/pole combination should be chosen so the slot/pole number is non-integer and the least common multiple between the slots and the pole is the highest. It is also very important to consider the fundamental winding factor; it should be as high as possible for the cost-optimal motor.
F1=Highest least common multiple (Slots,Poles)
F2= (Poles ×Slots)/F1
Minimizing the function F2 will lead to least change in magnetic reluctance with rotor rotation and hence the least cogging torque.

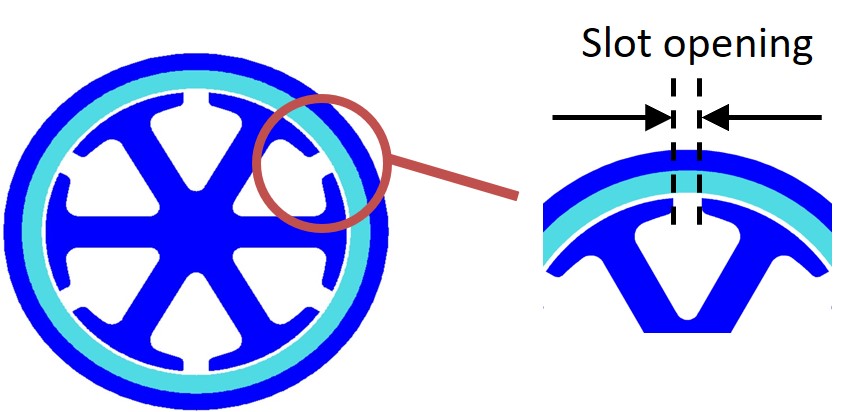
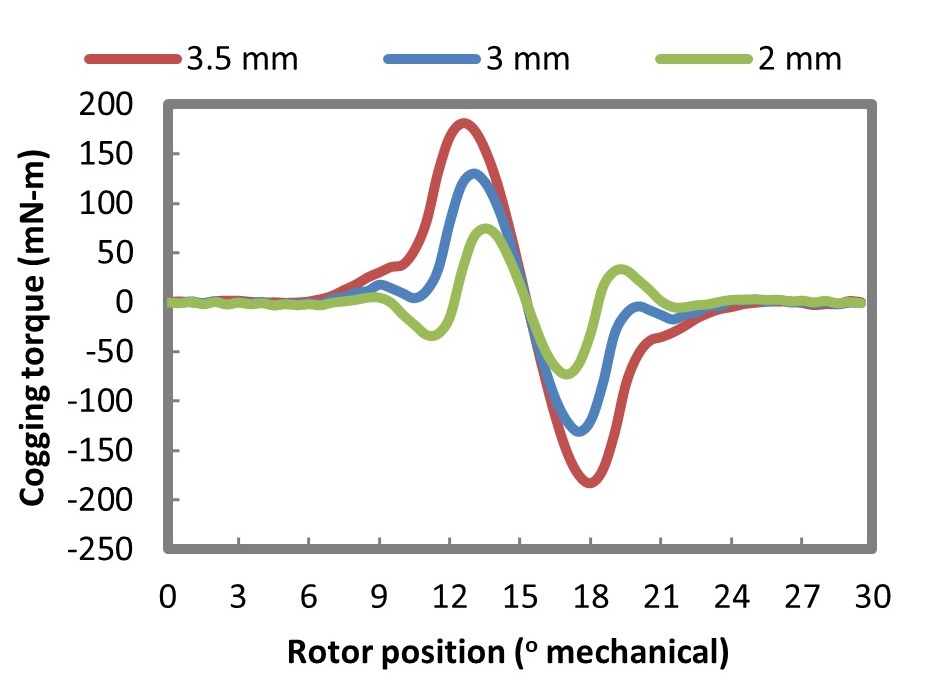
ii. Slot opening
The use of closed slots will eliminate the change in magnetic circuit reluctance when the rotor is rotating; reducing or eliminating the cogging torque. The closed slots increase the leakage flux and difficulty in creating winding in the slots using the automated winding machines due to the lack of openings for needles to pass through. Due to these challenges, most of the machines uses semi-open slot. The amount of slot opening will be as minimum required for winding and to avoid excessive leakage flux. The higher the slot opening, the higher the change in magnetic circuit reluctance and higher cogging torque.
iii. Presence of dummy slots
To change the effective number of teeth the airgap sees, dummy slots can be introduced on stator teeth. The introduction of the dummy slot will lead to an increase in effective airgap and hence slight reduction in airgap flux. The least number of dummy slots/teeth should be selected so that the number of effective stator slots/poles becomes non-integer. This will help reduce the cogging torque without significant change in airgap flux and hence the developed torque from a motor when no dummy slots are used.


Magnet and Magnetization Profile
The selection of the magnetization profile, the shape of the magnet, and the skew on the magnet are the factors affecting the cogging torque from a motor.
A. Skew Angle
Skewing the stator or rotor is a common practice to reduce the cogging torque when anisotropic magnets like Sintered NdFeB or Sintered Ferrite are used in a motor. For isotropic bonded NdFeB magnets (MQ1TM), the skew magnetization pattern on the ring magnet can be used. The use of an appropriate magnetization fixture can help in achieving the desired skew magnetization on MQ1TM ring magnet. Implementing skewing reduces the rate of change of reluctance seen by the magnet flux. The optimum skew angle results in the complete elimination of change in reluctance seen by the airgap flux and eliminates the cogging torque. The optimum skew angle depends on the number of slots and poles.
Optimum skew angle= (360°)/F1


Implementing skew affects the airgap flux and hence the developed torque. The skewed stator or rotor results in lower flux and, hence lower torque. Skewing of stator lamination also makes the automatic winding process complex. Depending on the requirement from an application the skew angle should be selected. The skew angle above the optimum one will lead to higher cogging torque.
B. Magnetization profile
For the anisotropic magnet, there is either a radial or straight magnetization profile. The isotropic magnet offers the advantage of tailoring the magnetization profile, just by using the appropriate magnetization fixture. It is common to achieve radial, Halbach or Hybrid magnetization profiles. Brushless permanent magnet (PM) machines employing Halbach magnetized magnets offer sinusoidal airgap field distribution and hence sinusoidal emf waveform and negligible cogging torque.

The magnetization profile selection depends on the number of poles and the magnet thickness. Halbach magnetization is preferred for the magnet with a high number of poles and/or thicker magnet.
C. Shape of magnet
The airgap flux profile and hence the harmonics can be changed by shaping the inner or outer diameter of the MQ1 ring magnet. Elimination or reduction of certain harmonics leads to lower cogging torque. Shaping the MQ1 ring magnet eliminates the need of using the skew magnetization profile. The magnet shaping concept mainly applies to motors with fractional slots/pole configuration. Besides reducing the cogging torque, the shaped ring magnet can help in achieving the desired motor performance at minimum active material cost.
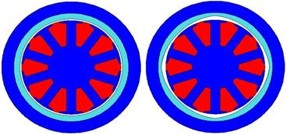
Right: Motor with shaped ring magnet


In conclusion, making the right design choices including magnet and magnetization profile are crucial for achieving motor with minimum or no cogging torque. With Magnequench’s motor design expertise and strong understanding on isotropic bonded NdFeB magnets and magnetization, we are committed to helping our customers arriving at cost optimal motor designs for their applications. Partnering with Magnequench means gaining access to cutting-edge technology, reliable support, and the expertise needed to propel your motor designs forward in today’s rapidly evolving landscape. Contact us today and let us help you achieve motor designs offering minimal cogging torque with our exceptional isotropic bonded NdFeB magnets.
Reach out to Magnequench to understand how we can collaborate: research@magnequench.com