Technical Articles: Motor Design – How To Design A Quiet Motor?
Magnequench Guide: How to Reduce Motor Noise
The automotive industry has been tirelessly working to minimize motor noise within a passenger vehicle. Reducing the noise produced by various accessory motors in a car is part of the solution on which automotive OEM suppliers are focusing. Understanding the causes of motor noise generation and mitigation techniques is a critical part of motor design efforts.
Motor noise is produced mainly due to following three reasons:
1. Electromagnetics
2. Mechanical Structure
3. Aerodynamics
The Magnequench application team works alongside its customer with a goal to eliminate or reduce possible electromagnetic causes of motor noise within a new or existing motor design.
“Cogging torque” is one of the most prominent electromagnetic causes for noise generation in a motor.
Cogging torque is defined as the attraction/interaction of the magnetic poles to the teeth (steel structure) of the laminations within an un-energized motor.
Cogging torque can be reduced by selecting appropriate design variables during motor design. Three of such design variables are, (i) combination of slot and pole, (ii) slot opening, (iii) airgap flux profile
(i) Combination of slot and pole
The combination of slot and pole should be such that the variation in the reluctance seen by the airgap flux is minimum. Motor with fractional number of slots per pole generally leads to lower cogging torque compared to the one with integer slots per pole.
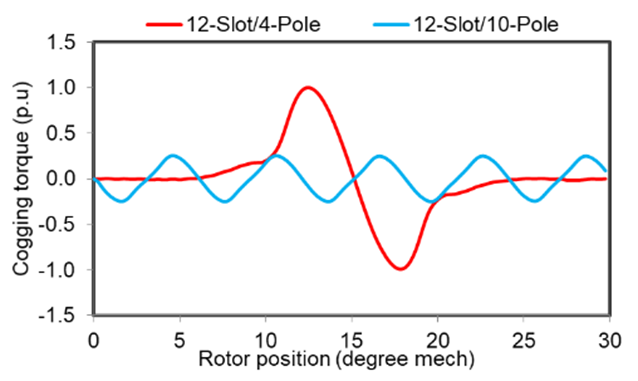
Effect of slot and pole combination on cogging torque
(ii) Slot opening
A smaller slot opening leads to lower variation in reluctance and hence lower cogging torque. The slot opening should be as minimum as possible considering the conductor diameter and ease of automatic winding. Generally the slot opening is about two to three times of the insulated conductor diameter.

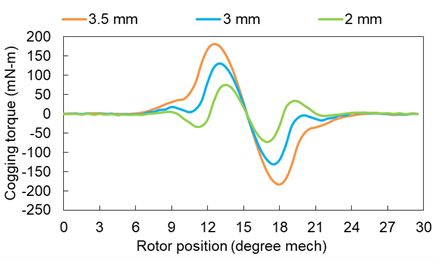
Effect of slot opening on cogging torque
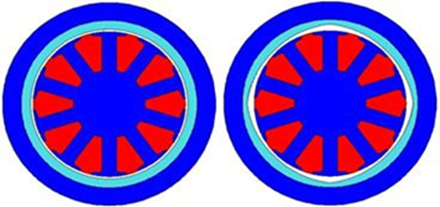
(iii) Airgap flux profile
The airgap flux profiles can be changed by using various methods, (a) Magnet shaping, (b) Magnetization of magnet and (c) Skewing either the stator teeth/magnet or magnetization profile on magnet
Magnet shaping and skewing either the stator teeth or magnet arcs are popular with anisotropic magnets like sintered neo and sintered ferrite. Incorporating a skew stator teeth with an automated winding leads to higher scrape rate for winding wires. On the other hand achieving a skewed sintered neo or ferrite arc magnet is expensive.
In case of an isotropic magnets like MQ1, the optimal airgap flux profile can be achieved by appropriate design of shaped ring magnet (magnet with variable thickness). The optimized shaped ring magnet offers lower cogging torque. The advantage of shaped ring magnet is ease of assembly compared to the assembly of arc magnets from anisotropic magnets.
For an isotropic magnet like MQ1TM different airgap flux profiles can also be achieved easily by appropriate design of magnetization fixtures. The use of appropriately designed magnetization fixture is one of the most cost effective method of achieving desired airgap flux profiles.
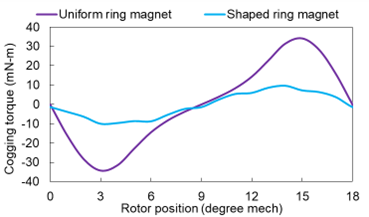
Effect of magnet shaping on cogging torque
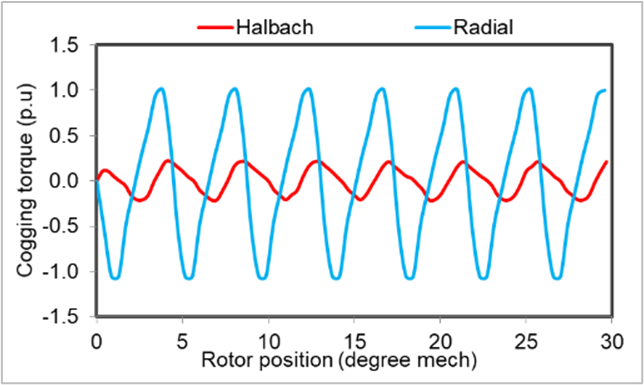
Halbach magnetization profile (Sinusoidal airgap flux density variation) offers lower cogging torque. Halbach magnetization is useful when the magnet has higher pole number and thickness. The lower pole number on magnet and/or the smaller thickness of the magnet leads to the higher pole to pole flux leakage and hence lower airgap flux and reduced motor performance. Alternatively a radial magnetization with skewing can be employed to achieve lower cogging torque.
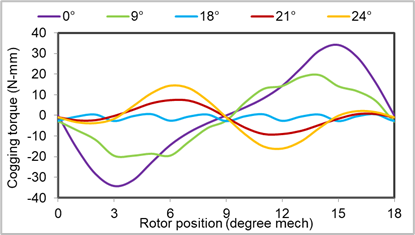
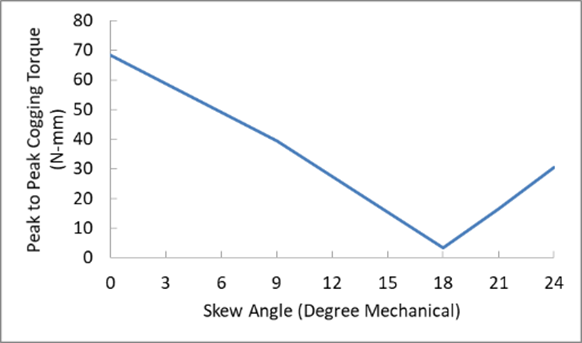
Effect of skewing or skewed magnetization on cogging torque
Besides above mentioned design variables it is also important to design a motor where the magnetic circuit does not go in deep saturation, motor does not have high torque ripple and for PM brushed DC motor no sparking at the brush and commutator contact surface.
Reach out to Magnequench to understand how we can collaborate: research@magnequench.com